


人の多次元複合体構造(6)----人体18規則と章程
【元吾氏】
(2019年初版)
----------目次----------
A)人の多次元複合体構造の情報モジュールシステム
1)人体情報モジュールの連動システム — 構造構築と相互作用タイプ
2)人体情報モジュールの連動システム — 18項目の管理章程と技術規則
B)18項目の管理章程と技術規則
第一部:人体5項目の章程(モジュール連動管理章程)
1)粒子集散閾値管理章程
2)錯位圧力閾値管理章程
3)重ね圧力閾値管理章程
4)連動密度閾値管理章程
5)逆向き発展閾値管理章程
第二部:人体13項目の規則(モジュール連動技術規則)
1)球体構造制御規則
2)モジュール回路システム規則
3)モジュール螺旋発展規則
4)モジュール点対点情報効果規則
5)情報粒子の増加干渉規則
6)情報粒子の減少進入規則
7)虚偽モジュール導入規則
8)モジュール記憶保存能力制限規則
9)モジュール侵入規則
10)モジュール相殺規則
11)触発モジュールメカニズム
12)混合型モジュールメカニズム
13)反モジュールAI自動アップグレードメカニズム
*附録:「地球人体規則委員会」
A)「地球人体規則委員会」とは
1)「載具粒子モジュール規則研究委員会」
2)「地球人体規則委員会」
B)「載具粒子モジュール規則研究委員会」の歴史
C)「意識強度研究管理委員会」の歴史
D)「地球人体規則委員会」の構成
----------
A)人の多次元複合体構造の情報モジュールシステム
《人の多次元複合体構造》の最初の5つの記事では、それぞれ次の内容が紹介されています:
(1)単重複合体、(2)二重複合体、(3)多重複合体、(4)18チャクラ、(5)DNA構造。
本記事は第6回目で、「人体18規則」を紹介します。
人体18の規則の正式名称は「人体情報モジュール連動システムとその18項の管理章程および技術規則」です。
以下、2つの部分に分けて説明します。
1)人体情報モジュールの連動システム----構造の構築とインタラクションの種類
人体を構成する各部品(=物質モジュールまたは非物質モジュール)は、すべて「情報モジュール」または「意識モジュール」と呼ばれます。
情報モジュールは「情報プログラム」から構成されています。
「情報プログラム」の本質は「意識プログラム」であり、人類が言う「AI知能プログラムモジュール」に似ていますが、さらに知的です。
人体情報モジュール(または意識モジュール)の構築には、YCCBという制御プログラムが使われます。
肉体および第1霊体から第10霊体の基本運行システムには、このプログラムが組み込まれています。
このプログラムは、情報モジュールを層別に、また機能別に構築し、それらの情報モジュール間の相互作用を管理します。
人体情報モジュール連動システムの詳細な説明については、元吾氏の記事《意識強度検出ポイント(9)右下区:モジュール交換区》をご参照ください。本記事では繰り返しません。
本記事は次の「情報モジュールの18項の管理章程と技術規則」の部分に焦点を当てて説明します。
2)人体情報モジュールの連動システム----18項の管理章程と技術規則
情報モジュール間には協力メカニズムがあり、地球の国際的な一般規則に基づいて管理されています。
この規則は「地球人体規則委員会」(*附)によって制定されています。
「地球人体委員会」は、計18項の情報モジュール管理章程および技術規則を発表しており、人間機械体情報モジュール運行の基本的な管理規則を構成しています。
18項の管理章程と技術規則の概略?
- 原則:
催眠システムの最も基本的な原則は「気づかれない原則」です。そのため、人体情報システムへの催眠干渉は一定の閾値範囲内に制限される必要があります。さもなければ、気づかれやすくなります。(催眠システムについては、元吾氏の記事《催眠輪廻とは》をご参照ください)
異なる種類の技術閾値は、ある程度の被験者の技術テストを経て設定および調整されます。
b) 目的:
過度な干渉によってモジュール間に崩壊が生じ、不可逆的な損害が発生することを防ぎ、自由意志に反することを避けます。
有効なガイドと管理を行う方法を研究し、テンプレート間の連動が予定された催眠目的範囲内でコントロールされ、気づかれないようにすることを目指します。
c) 18項の管理章程と技術規則は、上記2つの目的のもとで、催眠ゲームをより楽しめるようにしながらも、失敗しないようにするためのものです。T組には失敗の事例があり、催眠ゲームがより効果的で規範的で管理しやすくなるように、規則を設ける必要があると認識されました。(T組については、元吾氏の記事《催眠輪廻とは》をご参照ください)
18項の管理章程と技術規則の分類?
- マクロな人体情報モジュール連動の管理章程:5つ。
- ミクロな人体情報モジュール連動の技術規則:13つ。
以下、2つの部分に分けて解説します。
---
B) 18項の管理章程と技術規則
第一部:人体の5項の章程(モジュール連動管理章程)
1)粒子集散閾値管理章程:
粒子集散:モジュール間で、情報粒子の集散によって情報の受信と伝達が行われる。
情報粒子の集散に対する干渉手段は、一定の閾値を超えてはならず、さもないと情報連動に影響が生じ、気づかれやすくなる。
つまり、情報干渉が過度になると、個体の情報受信と伝達に過度の歪みが生じ、容易に個体に気づかれる。
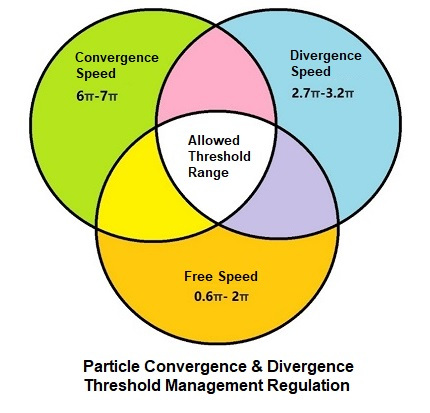
三つの閾値:
1. 集積速度(モジュールの情報進入速度):6π-7π (π = 相対速度倍数値)
情報モジュール間の情報伝送速度。
これは、多くの情報粒子が情報源モジュールからターゲットモジュールへ集積する運動速度/振動範囲値を示します。
振動速度は相対的な値で、ターゲットの関連性を基準値(個体の元の値)とします。この臨界値を超えると、モジュールの連動に連鎖的な影響を与え、相対的に不可逆的な結果を引き起こす可能性があります。
粒子源/情報源の振動範囲幅が大きすぎると、各粒子源とターゲットの振動幅が不調和な差異を生じます。
目標の情報受信閾値に相当します:速度、容量、深度、広さ、周波数内容などが含まれます。
2. 離散速度(モジュールの情報クリアリング速度):2.7π-3.2π
情報粒子が集積状態から瞬時にモジュールから消去される速度値。
あまり速すぎると、モジュールが分裂します。遅すぎると、動力不足となり、元々の意識の慣性力に負けて、離散できなくなります。
3. 遊離速度(モジュール内の情報状態):0.6π-2π
情報粒子が相対的に静的な振動幅にある状態。
速すぎると、不安定になります。遅すぎると、沈殿し活力を失い、情報が凝固して抽出できなくなります。
これは冷蔵庫での食品保存に例えられます。温度が低すぎると凍結し、高すぎると腐敗します。
この閾値の実用性は、保存状態、待機状態、フィルタリング状態などが含まれます。
干渉手段:
個体の情報粒子の集散の自然状態(個体の元の値=基準値)に基づいて、さまざまな干渉組み合わせを行います(図参照)。これらは、上記の閾値範囲内でコントロールされ、催眠目的を達成しつつ、察知されないようにします。
2)錯位圧力閾値管理章程:
錯位圧力:各情報モジュール間のパイプラインに圧力を加え、管道が錯位するように干渉する手段。
干渉が閾値を超えると、重大な影響が生じる。
例:本来AからBに送るものが、圧力が大きすぎるとMに送られ、個体に気づかれて隠密干渉の目的が失われ、同時にモジュールの自己修正メカニズムが起動する。
錯位閾値範囲の設定目的:
1)個体に気づかれないようにすること。
2)モジュールの自己修正メカニズムを起動させないこと。
圧力が小さすぎると効果がない。
閾値:
1.5〜3.5倍の錯位値。
これはAIの深層学習によって得られた保守的な閾値であり、人類の平均値でもある。
個体の状況に応じてカスタマイズ可能。
3)重畳圧力閾値管理章程:
重畳:自然のモジュールの上に干渉指令のモジュールを追加するもので、非自然のモジュール、または重畳モジュールとも呼ばれる。
重畳圧力:
重畳モジュール間での連動時に、異なる重畳構造の組み合わせにより異なる圧力が生じる。
干渉手段:
重畳モジュールに指令を追加することで、モジュール情報の連動に影響を与える。
しかし、モジュール間で重畳効果が生じ、振動範囲が発生する。
干渉が一定の範囲を超えると、モジュール全体が崩壊し、フリーズする。
三つの閾値:
- 直列重畳:約6t(人類の平均値。以下は同じ)。
- 並列重畳:約15t。
- 複合重畳:約32t。
- 総複合値:約53t。
パラメータ単位:t = モジュールの重畳出力の圧力倍数値。
圧力の意味:
干渉指令がモジュールに入力された際に、自然状態とは異なる相対的な差異値が生じること。
差異が発生すると、モジュールが自由意志による反発力を生じる。
反発力が閾値範囲を超えると、モジュールがストライキを起こす。
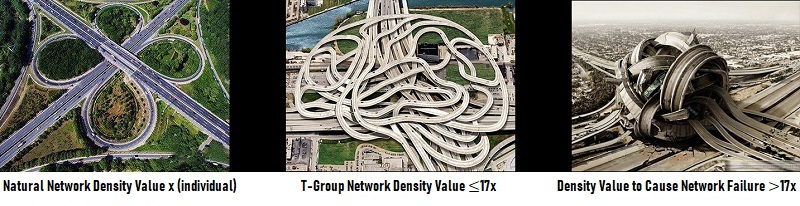
4)連動密度閾値管理章程:
連動密度閾値:各情報モジュールが構成する組み合わせ構造には「密度」と呼ばれる数値があり、これはモジュール間の多くの接続線によるネットワーク密度を指す。
接続線には様々な機能があり、モジュール間の連動や協力、情報回路の追加・変形・伝達、エネルギー転送など、干渉プログラムとして働き、カテーテルのような役割を果たす。
自然状態では、モジュール間の接続線は少なく、数本のシンプルな線で効率よく伝達が行われる。
干渉手段:
T組は多くの接続線を追加して、まるで高速道路のように複雑に接続を巡らせている。目的は、情報の歪み、速度への影響、監視、加工などのためである。
接続密度が高すぎると、エネルギー不足が生じるため、ネットワークの密度は適切な数値内で構築する必要がある。
閾値:
17倍の密度値。つまり、自然なネットワーク密度の17倍を超えてはならない。
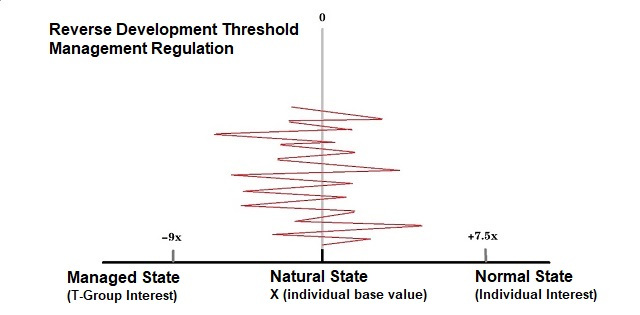
5)逆行発展閾値管理章程:
逆行発展閾値は三角形の曲線図で示される。
三つの閾値:
1)自然状態(純粋な天然で最適化されていない):1または0(相対基準値)、個体の自然値に対して設定されたx値。
2)通常状態での最適な発展プラン(個体の利益に最も適合):+7.5x。発展可能な範囲。
3)管理状態での最適な発展プラン(T組の利益に最も適合):-9x。圧縮可能な範囲。
人類の平均測定範囲: +7.5xから-9x。
サンプルデータ:(*注2)
- 被験者2号:+3x(範囲:+5x〜-17x)。
- 被験者1号:+1.5x(範囲:+3x〜-25x)。
- 被験者3号:-2x(範囲:+7x〜-10x)。
被験者3号の測定データは以下のような図になる:(時間軸上に赤い曲線が下から上へと進み、山道やばねのような形を取り、意識のパターンが努力しているものの、努力と成果が比例せず、不利な状況にあることを示している)。
研究の全プロジェクトでは、この3つの閾値の比率曲線を用いて、プロジェクトを客観的に定性評価し、広範な用途に参考として用いる。
1と2の比率も変動しており、催眠者と被催眠者の双方の意図に応じて、動的に調整され、平衡と管理が最大化されるよう、マクロな管理が行われる。
閾値を超えると、個体が逆行発展する可能性はほとんどなくなる。たとえば、植物状態になった場合、覚醒することは非常に困難である。
反対に、発展が速すぎると、個体は非常に自由になり、コントロールが難しくなる。
第二部分:人体13項規則(モジュール連動技術規則)
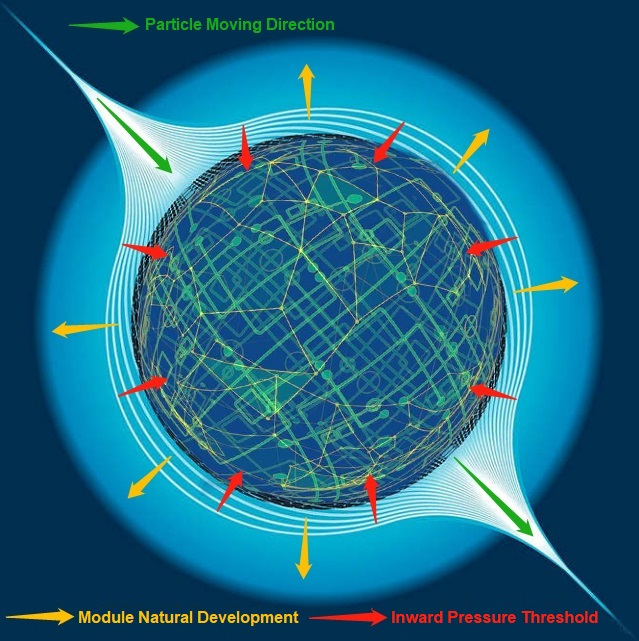
1)球体構造制御規則
球体構造:
多くの情報モジュールが球形内で異なる位置にあり、ゆっくりと移動している。モジュール連動の過程で、最終的な情報の出入口は球形の両端、上下にあり、軸の端が情報の出入口を形成している。両端は細く延びており、これが全体の連動モデルである。
全てのモジュールが並列で球形を形成し、全ての情報は計算とフィルタリングの過程を経て出入りする。こうして形成された球形構造が牽引力を生み出し、全てのモジュールを一つにまとめる。
目的:
全てのモジュールの情報フローの出入りを効果的に管理すること。
各モジュールは運動中に自動で発展していく。
球形:
モジュールの発展を制限し、それが限定された領域内に収まることで、モジュールの発展を管理しやすくする。
球の制約がなければ、モジュールは様々な形状を呈し、球体は締まったり緩んだりすることができる。
人工的に球体を締めると、モジュールの衝突が発生し、逆方向の情報断層が生じる。
モジュールが発展するにつれて、球体はますます大きくなる。空間が不足すると、衝突と圧迫が生じる。
干渉手段:
球体構造のAI制御センターが圧力値に応じて自動で球形を緩め、球形が大きくなるようにする。さもなければ、逆方向の情報断層が発生する。
目的:全てのモジュールを非同期および断層の状態に保ち、抑制の役割を果たす。
圧力が大きすぎて球体が緩められない場合、球体が破られることがある。従って、閾値を参照して、制御可能な範囲内に収める必要がある。
総括:全ての自然モジュールは運転中に自律的に発展する法則を持ち、球体による制御がなければ制御が困難になる。
最終目的:人類の自然発展を遅らせ、人類が成長できないようにすること。
圧力閾値:
人類全体の閾値:3〜7倍。各モジュール間の相対構造圧力値sは、モジュール間で異なる。
- 被験者2号:3.5。
- 被験者3号:4.7。
- 被験者1号:2.7(球形構造はまだあり、破壊されていないため、1に戻すのは難しい)。
実際の制御力値:
モジュールの全体的な合成数値には、融合度・同期性・安定性が含まれ、これが球体の管理機構の実際の制御力と対抗する。
例:
- 被験者1号:=原始制御力1/モジュール合成数値2=1/2。
モジュールの合成数値が高いほど、抵抗力も強くなる。
人類全体:1。相対的な基準値=原始制御力。抵抗力が強いほど、モジュールの合成数値の設定が高くなる。
サンプルデータ:
- 被験者2号:1/1.5。
- 被験者3号:1/1.1。
- 被験者1号:1/2.2。
解除方法:
球体構造は集団制御機構であり、球体を破壊するには集団意識を向上させる必要がある。あるいは、個体の球体を暴力的に破壊する方法もある。
最も簡単な方法としては、球体とモジュールは一体化しているため、単純な破壊ではモジュールも破壊してしまう。DNAが解除されると、この球体のコア構造も自動的に失効する。
ただし、催眠輪廻システムから離脱しない限り、意識強度が高くても1に限りなく近づくことしかできず、完全に無効化することはできない。
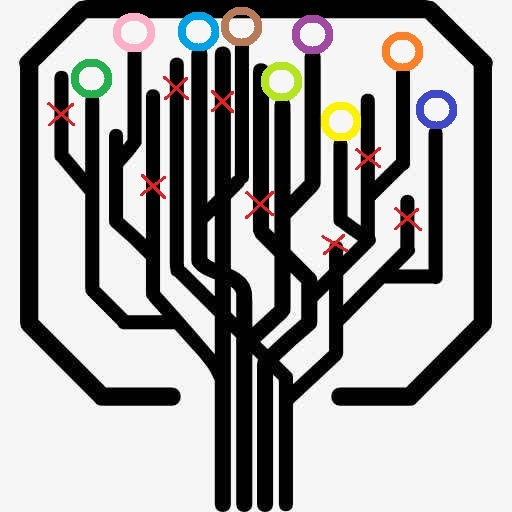
2)モジュール回路システム規則
モジュール回路システム:
各モジュールは連動過程の中で、情報の一部がモジュール内に戻り、その情報を基に記録が行われる。
情報がモジュールを通過する際、参照数値や法則が情報回路を通して記録され、これによりモジュールは後続のアップグレードを行う。この機能はモジュール連動の一つの特徴である。
これらの情報はモジュール連動の中で共用情報回路を形成し、全体の運行効率を高める。
この特性を利用して、T組は共用情報回路に制限を加え、情報共有の速度を遅らせて情報回路システムに混乱を生じさせる。
T組の制限手段:
遅延:複雑な接続ネットワークを形成するために異なる配線方法を追加し、情報回路の速度を遅くする。一部の情報が目的地に到達しないようにし、全体の回流効率を大きく制限する。
混乱:誤った配線もある。
例:Aモジュールの情報が回流中にBモジュールに戻り、位置がずれる。物流の配達が意図的に間違った目的地に送られるように、全体のモジュール効率が低下する(図参照)。このため、モジュール全体の自己学習や自己アップグレード機能が大幅に減少する。
密度閾値:第4管理章程の連動密度閾値。
人類:17倍の閾値。
サンプルデータ:
- 被験者2号:9。
- 被験者3号:12。
- 被験者1号:2。
解除方法:
モジュール間の融合度を高め、情報が最速で回流するようにする。
融合度:主に意識強度で決まる。
例えば、モジュールの開発度、モジュール間の運転などの意識強度数値。
これは構造的な機構であり、スイッチのように簡単に切り替えられるものではない。意識強度が高くても自然数値に限りなく近づくことしかできず、催眠システムから脱出しない限り、完全な解除はできない。
DNAが解除されると、自然に失効し、モジュールが自動的に再編成されて自然な状態に戻る。
3)モジュールの螺旋発展規則
モジュールの螺旋発展規則:
モジュールは連動運転の中で螺旋的な促進効果を形成し、全てのモジュールが螺旋上昇的に促進され、累積効果のようになります。
干渉手段:
T組はこの特徴に対して効果的に抑制を行います。
自然な発展は並行螺旋で、T組は並行構造を直列構造に変え、効率が大きく低下します。
T組はモジュール間に直列の多層的な魚骨状の中枢情報システムを構築しています。
原始システム:全てのモジュールが整列され、平等に並行するシステム。
例えば:あるモジュールがプログラムや経験、ルールなどを発信し全モジュールの効率を高める場合、全モジュールが並行して促進されます。
T組の魚骨構造:下から上へと一つずつ直列で促進を受け取り、連動効率を抑制することが目的です。
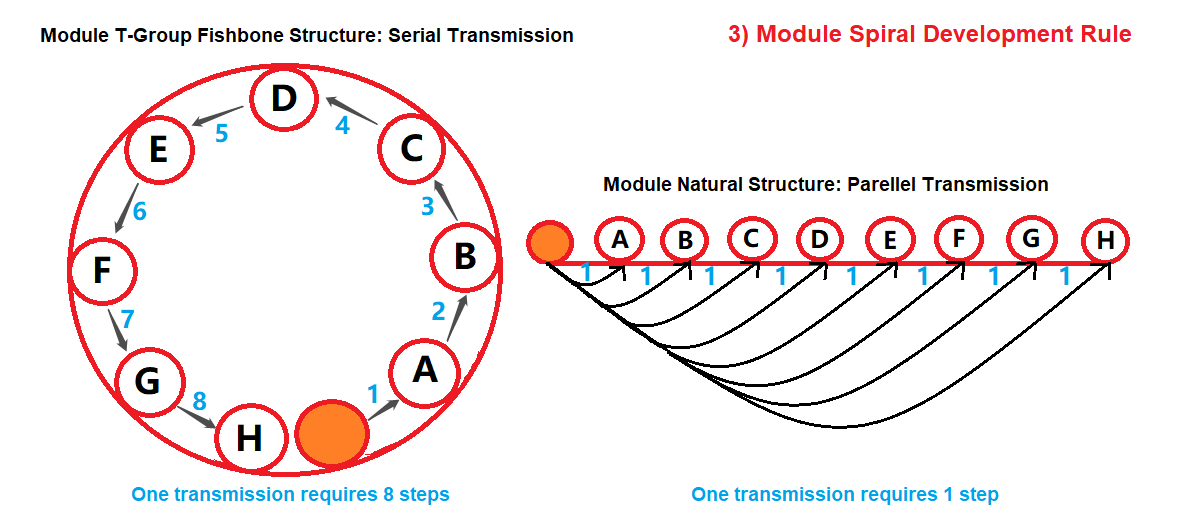
螺旋促進数値:最高効率1対1、自然比率。
人類の平均数値:1/5〜1/8。
サンプルデータ:
被験者2号:1/4。
被験者3号:1/5。
被験者1号:1/2。
解除方法:
意識強度が高い場合、螺旋の上昇は構造的制約を自然に突破し、直接出力されます。
完全な突破:構造的に結び付けられているため、催眠システムから離れない限り、1に無限に近づくだけで完全には無効にできません。
DNAの解除後、この構造は無効化されます。
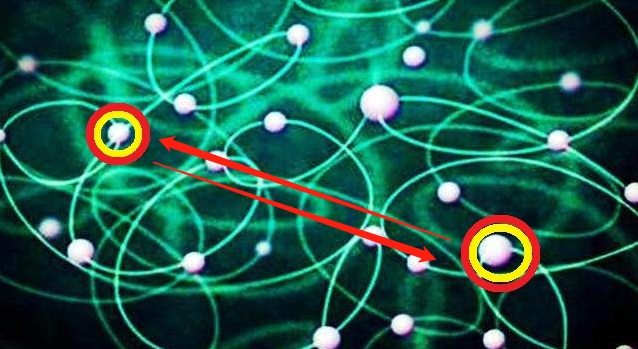
4)モジュール点対点情報効果規則
モジュール点対点情報効果:
モジュール間の情報は、接続を介さずに同じ情報周波数が発生すると、非接続的な遠隔同期情報感応を生じ、量子もつれに似た現象が起こります。
この遠隔情報伝達は接続による干渉が不可能です。
干渉手段:
T組は感応を触発し、情報を記録・取得する方法で干渉します。
情報が入るとAI送信機にフィードバックされ、この信号を模倣して妨害波を発生させ、情報が完全に遠隔伝送できなくなります。
弱点:事前に干渉できず、情報出現後の干渉しかできません。これは受動的な干渉機構であり、能動的な干渉はできません。
干渉形式:情報を同周波数で同期し、干渉システムが情報を捕捉、情報をコピー・変形・歪曲して情報源に送り返し、個々の情報を混乱・不真実にします。
情報の歪曲程度:小さすぎると効果が少なく、大きすぎると気付かれやすいため、情報自身の論理関係に適合する必要があります。
解除方法:
外部の干渉では完全に遠隔伝送を防げませんが、一定の範囲で効果的な干渉が可能です。
意識強度は依然として解除の主要な方法である。
点対点干渉閾値:
人類の平均:0.5〜3.5倍のずれ閾値。元情報を100%基準とし、干渉は情報を50%〜350%の範囲で歪曲またはずれさせます。
言い換えれば、干渉は50%から350%まで、情報の歪みや情報の位置ずれを引き起こす可能性がある。
サンプルデータ:
被験者2号:0.3。
被験者3号:0.3。
被験者1号:0.1。
被験者4号:4.0〜4.5。
被験者17号:5。
5)情報粒子の増加干渉規則
情報粒子の増加干渉規則:
大量の情報粒子がモジュール連動システムに入ると、システムはランダムに不純物を生成し、情報パイプラインに混入させます。
そのため、モジュールの運用圧力、負担、運転時間、および難易度を増加させることで、元の情報とは関係のない不純物を増加させることができます。
T組はこのような干渉装置を使用し、情報がモジュールに入るのを検出した際、AIが自動的に不純物情報をモジュールに混入させます。
その目的は、モジュールの運用時間と負担を増加させ、情報の正確性を低下させ、冗長情報を増加させ、処理効率を低下させることです。
T組のこの干渉システムにはAI学習メカニズムがあり、個体の特性を分析して深層学習を行い、その後、個体の特性に適した不純物を大量生産します。できるだけ個体に気づかれないようにします。
この干渉システムは、情報の特性に基づいて学習することもあります。例えば、個体が特定の情報を長期間受け取っている場合、システムはその情報の長期的な確率に基づいて分析を行います。
例えば:
個体が特定の情報を頻繁に受け取る習慣がある場合、干渉装置はその習慣を検出し、特別な干渉を行います。
その主な目的は、モジュールの自動学習および自動アップグレードの効率を遅らせ、低下させることです。そうでないと、モジュールは頻繁に使用される情報に基づいて自動学習および自動アップグレードを行ってしまいます。
(小さなロボットAIが大きなロボットAIに干渉するようなものです。)
干渉規則:
情報の不純物投入量の制限範囲値。あまりに低いと効果がなく、あまりに高いと簡単に発見されます。
干渉閾値:
人間の平均値:0.2-2倍増加値。
サンプルデータ:
被験者2号:1(1倍増加可能)。
被験者3号:2.5(特定の傾向面)。
被験者1号:0.5。
被験者4号:1.8。
被験者5号:2.7。
被験者6号:1.2。
被験者7号:1.9。
被験者16号:1.5。
6)情報粒子の減少進入規則
情報粒子の減少進入規則:
バリア式のフィルターシステムにより、情報粒子が歪んだり不完全になる。これは主に個体の特徴と傾向に基づいて形成されます。
この原理は、個体の主観的な傾向、潜在意識の傾向、固定化傾向などに基づき、情報フィルターネットを形成し、入ってくる情報を選別して遮断するものです。
このフィルターと干渉装置はAIによって自動的に運用され、連動性・拡張性に優れています。
個体の特性や傾向に応じて拡張範囲=拡張値が設定されます。例えば、個体がDを受け入れない場合、DとEにまで拡張される可能性があります。
拡張閾値:
広すぎると気づかれやすいため、自然で違和感のない感覚を与えることが求められます。
人類平均:±0.3〜±2の範囲で、上下の割合に似た範囲です。
サンプルデータ:
被験者2号:±0.3(上下拡張浮動範囲30%)。
被験者3号:±0.3。
被験者1号:±0.1。
被験者4号:±1。
被験者5号:±0.8。
被験者6号:±0.5。
被験者7号:±0.8。
被験者16号:±0.4。
7)虚偽モジュール導入規則
虚偽モジュールの導入:
各モジュールの連動プロセスに偽モジュール(クローンモジュール)を導入し、干渉を行います。
この方法は一連の監視によって原生モジュールをクローンし、初期化する純粋なミラーリング干渉手段です。
虚偽モジュールは原生モジュールを自動的にクローンし、クローンデータをバックアップして同期データを微細に改造します。
この規則はインプラントと関連しており、クローンモジュールでインプラントをサポートします。
クローンはモジュールだけでなく、運用規則やパラメータにも関わります。
クローンの自己メカニズム:
原生モジュールを学習・複製するプログラムで、情報データを取得しインプラントに貢献します。
これは、原生モジュールが外部からの干渉に気づきにくくするためです。原生モジュールは置き換え不可能ですが、虚偽モジュールは原生モジュール間に虚偽情報を混入させることができ、インプラントに情報を提供することも可能です。
虚偽情報を導入する範囲が広すぎるとモジュールに検知され、狭すぎると効果がありません。
偽情報導入閾値:
人類平均:1〜5倍。個体の原生モジュール認識機能に応じて参考される個体相対倍率値。
サンプルデータ:
被験者2号:0.5(増加倍数範囲50%)。
被験者3号:0.8。
被験者1号:0.1。
被験者4号:1.3。
被験者5号:1.8。
被験者6号:1。
被験者7号:1.4。
被験者16号:1.2。
8)モジュール記憶保存能力制限規則
モジュールの記憶保存能力:
モジュール自体には記憶保存機能があり、コンピュータのメモリのように情報特性を記録します。
通常、ある記憶が回想されなければ、時間と共に徐々に忘却または薄化されます(完全に消えるわけではなく、実際には薄化されるだけで記憶は消失しません)。
T組の干渉手段:
モジュールの記憶機能を制限し、記憶能力に干渉します。
例えば、ある記憶の本来の忘却期間(薄化期間)が5年である場合、T組はこれを3年に短縮します。
制限方法:
T組は大量の不要データをモジュールに入力し、処理効率を低下させ、情報干渉と混乱を通じて記憶容量を圧縮します。
これは記憶倉庫にゴミを詰め込むようなもので、可用スペースが減少します。
モジュールの観点から見ると、倉庫は箱でいっぱいになっていますが、実際の箱は空であるか、または役に立たない情報が入っています。
例えば、心の癒し系の内容は一見立派ですが、実際には実用価値がほとんどありません。
原生モジュールには自動クリーニングプログラムがありますが、識別能力とクリーニング能力は個体によって異なり、効率が低い場合は有用なものと無用なものを一括で削除する可能性があります。

閾値:
気づかれないように忘却期間(薄化期間)を短縮し、人類の記憶能力を干渉することを目指します。
人類平均:-2〜-8の効率倍数。個体相対値。
サンプルデータ:
被験者2号:-3.5(3.5倍に短縮)。
被験者3号:-4。
被験者1号:-1。
被験者4号:-5。
被験者5号:-4.5。
被験者6号:-4.3。
被験者7号:-4.5。
被験者16号:-4.2。
9)モジュール侵入規則
モジュール侵入:
モジュール連動管理機が定期的にウイルス情報粒子を導入します。
連動システムの監視を通じ、AIシステムがモジュールの特性をシミュレートし、定期的にウイルス検査を実施。多くのウイルス粒子をモジュールに導入することで、モジュールの脆弱性数値を検出します。

閾値:
検出過程では、個体に気づかれないようにする必要があり、制御可能な閾値範囲が求められます。
強すぎると、脆弱性が個体に察知され、逆に無料の健康診断のようになってしまいます。
個体に気づかれずに脆弱性を発見することで、脆弱性を利用する目的を達成します。
閾値範囲は各モジュールの特性に基づいて制御されます。
人類平均**:2〜5Ω、破壊強度単位レベル。モジュールの耐久力に比例。
モジュールへの破壊効果:
- 1Ω:処理が混乱するが、処理可能。
- 2Ω:データ処理エラーが発生するが、情報の全体解釈には影響しない。
- 3Ω:エラーが増え、情報の全体解釈の滑らかさが低下する。
- 4Ω:小さな論理エラーが発生し、情報の正確性が若干低下。
- 5Ω:大きな論理エラーが発生し、情報の正確性が大幅に低下、詳細が失われる。
サンプルデータ:
- 被験者2号:5(モジュール識別能力=ウイルス耐久能力。5Ωを超えると発見されやすいため、手動調整が必要)。
- 被験者3号:4。
- 被験者1号:5。
- 被験者4号:2.5(2.5Ωで検出目的を達成可能)。
- 被験者5号:3.2。
- 被験者6号:3.5。
- 被験者7号:2.8。
- 被験者16号:4。
10)モジュール相殺規則
モジュール相殺:
原理は、原生モジュールの特性を利用して対立を生じさせ、モジュールの実行力を打ち消すものです。これは内部分裂や自我消耗(内耗)を促すようなものです。
干渉ルール:
T組の干渉制御機構は、最大の対立を引き起こすモジュールを探し、データ相殺を行って矛盾を生じさせます。
モジュール相殺過程で矛盾が大きすぎると、個体は自省機構に入り、原生モジュール間で再計算と融合プロセスが自動的に始まります。自我促進機構が起動し、衝突するモジュール間の融合度が再計算・自省・アップグレードされ、陰陽のような反作用の原理が働きます。
したがって、T組の干渉制御は、モジュールの衝突が激化しすぎないように調整し、原生の自省機構を作動させないようにします。
閾値:
人類平均:2〜5Φ、衝突強度単位レベル。モジュールの耐久力に比例。
サンプルデータ:
- 被験者2号:4.5(衝突強度倍数)。
- 被験者3号:3(3倍で干渉目的を達成可能)。
- 被験者1号:5。
- 被験者4号:3.2。
- 被験者5号:3。
- 被験者6号:3.8。
- 被験者7号:3。
- 被験者16号:3.8。
11)触発モジュールメカニズム
触発性モジュールメカニズム:
モジュールにはトリガー管理機構があり、すべてのモジュールにはトリガー数値が設定されています。情報がトリガー数値に達すると、モジュールは作動を開始し、全体システムがモジュールのトリガー数値を管理します。原生システムは秩序立っており、各モジュールとの調和性が非常に高いです。
T組はシステムのトリガー数値を修正し、モジュールのトリガータイミングを最適状態から外し、最終的に全体的な稼働効率を低下させます。
トリガー数値は、各モジュール(意識強度レベルの主要モジュール)によって異なります。
T組が制御する際には、数値を増減させ、トリガータイミングを前倒しまたは遅延させます。
触発効率制限閾値:
人類平均:2〜5倍(低減倍数)、反比例値。
数値が大きすぎると、モジュールの稼働が混乱し、個体が大きな挫折を感じやすくなり、察知されやすくなります。
小さすぎると、制御効果が不足します。

サンプルデータ:
- 被験者2号:1.5(1.5倍低減)。
- 被験者3号:2.1。
- 被験者1号:0.7。
- 被験者4号:2。
- 被験者5号:2。
- 被験者6号:2.1。
- 被験者7号:2.1。
- 被験者16号:2。
12)混合型モジュールメカニズム
混合型モジュールメカニズム:
上記の複数の干渉機構を組み合わせて調整し、各種制御手段が最適な状態になるようにします。情報の最終的な整理と融合後の出力に対して干渉を行います。
プログラムの構成:
1)上記の各規則内の制御機構を効果的に管理。
2)情報の最終整理と融合の出力に対して干渉。
T組には異なる部門があり、各部門が異なるモジュール数値の具体的な調整を担当します。各部門のリーダーは、総合的な数値のマクロ調整を担当します。
「第5章程:逆行発展閾値管理章程」と関連があり、閾値は同じです。
1)自然状態(純粋に自然で最適化されていない):1または0(基準値)を基準とし、個体の自然値をx値とする。
2)通常の最適な調整状態(個体の利益に最も適している):+7.5 x。発展の余地。
3)管理状態での最適な調整状態(T組の利益に最も適している):-9 x。圧縮可能な空間。
閾値:
人類平均の測定可能範囲:+7.5xから-9x。上記のように、負の値の制御が主体です。
サンプルデータ:
- 被験者2号:+3x(範囲:+5xから-17x)。
- 被験者3号:-2x(範囲:+7xから-10x)。
- 被験者1号:+1.5x(範囲:+3xから-25x)。
- 被験者4号:-1xから-2x(範囲:+7.5xから-11x)。
- 被験者5号:-1.2xから-1.5x(範囲:+7xから-9x)。
- 被験者6号:-0.8xから-1x(範囲:+8xから-12x)。
- 被験者7号:-2x(範囲:+8xから-9x)。
- 被験者16号:-0.5x(範囲:+6xから-12x)。
13)反モジュールAI自動アップグレードメカニズム
モジュールAI自動アップグレードメカニズム:
人体ロボットの原生モジュールのAIシステムは、自動的にアップグレードされる自然状態です。つまり、外来情報がモジュールに干渉や操作を加えた場合、モジュールは自動的に学習・アップグレードします。
反モジュールAI自動アップグレード**:
T組は、この機構に干渉し、モジュールが連動プロセス中にアップグレードできないようにします(人体ロボットの自動学習・自動アップグレードを防止するため)。
干渉手段としては、閾値制御センターを通じて閾値範囲を制御し、モジュールが閾値によって起動されるのを防ぎ、自動アップグレードを阻止します。これにより、モジュールのアップグレード機能が常に眠った状態でロボットのままでいることを目指します。

閾値:
総合数値であり、管理機構に重点を置いています。
「第5章程:逆行発展閾値管理章程」と連動。
第12規則よりも包括的で、正の値も含みます。
もし個体が覚醒意識を示した場合、正の値を調整し、個体を一時的な向上状態にします。
例:被験者3号の仮の正の値による仮の向上状態(ただし意識強度の総合値は向上しておらず、個体が識別しにくい仮の向上状態)。
2つの総合的閾値の焦点:
1)第5章:主に不可逆の閾値範囲。
2)第13規則:主にモジュールの自動アップグレード機能が起動されないようにする閾値範囲。
人類平均:±4x。起動閾値範囲の平均値で、他の要因も含まれ、T組が各部分でそれぞれ管理します。
サンプルデータ:
- 被験者2号:+3x/±2.8x。
- 被験者3号:-2x/±5.8x(仮の向上状態)。
- 被験者1号:+1.5xから+2x/±1.7x(旧数値、最新の数値はなし。T組のデータベースに長期更新がなく、被験者が数値を突破し範囲の特定が困難)。
- 被験者4号:-1xから-2x /±6x。
- 被験者5号:-1.2xから-1.5x /±5.5x。
- 被験者6号:-0.8xから-1x /±5x。
- 被験者7号:-2x/±6x。
- 被験者16号:-0.5x/±5x。
---
*注意:
上記はあくまで平均値と総合値です。
個体の実際の状況:
個体の特定の強みや特殊な数値は、平均値や総合値の制限を突破し、自動学習・自動アップグレード機能を引き出す可能性があります。
そのため、強みを強化し、強みで弱点を打破することも、効果的な覚醒戦略となります。
----
附録:「地球人体規則委員会」
A)「地球人体規則委員会」とは
正式名称は「載具粒子モジュール規則研究委員会地球分会」。
1)「載具粒子モジュール規則研究委員会」について
これはゲームの「載具」モジュールの連動性を研究・管理する組織です。
ここで言う「ゲームの載具」は、人間が「身体」と呼ぶもの、つまり機械的な身体のことです。
研究・管理範囲:すべての催眠惑星(T組およびSグループが運営する星を含む)。
これは非常に大規模な研究組織で、コア委員会のメンバーは12人、全体の職員数は1万人以上おり、異なる催眠星に配置されています。メンバーには人型や爬虫類型など、多種多様な生命体が含まれます。
2)「地球人体規則委員会」について
これは「載具粒子モジュール規則研究委員会」の地球分会です。
地球人の「ゲームの載具」、つまり人類の「多次元複合体」に関わっています。
B)「載具粒子モジュール規則研究委員会」の歴史
もともとは「意識強度研究管理委員会」(T組とは独立した研究組織)から分離されたものでした。
当初は小規模でしたが、数回の組織再編と発展を経て、専属のシステムとして成長し、意識強度研究と密接に関連するようになりました。技術者の多くはT組の社員や関連する星間連盟のメンバーです。
C)「意識強度研究管理委員会」の歴史
最初は意識強度の独立性を研究するための小規模な技術組織でした。
その後、1組が登場し、リソースが統合されました。
この組織はその後、催眠星の開発と管理プロジェクトに関わるようになり、全体の業務の約80%が「意識制限」技術の研究に費やされています。
催眠分野外のプロジェクトは約20%で、主に「意識拡張」技術の研究に充てられています。
D)「地球人体規則委員会」の構成
「地球人体規則委員会」は職員数が2000人以下で、コア委員会には9人のメンバーがいます。あまり公にはされず、非常に隠密性の高い組織です。
この委員会は研究を主目的としており、T組から割り当てられたプロジェクトを主な研究対象としていますが、独立性が比較的強いです。
管理モード:
コアメンバーはローテーション制で、リーダーは委員会選挙で選ばれ、メンバーは比較的固定されており、T組の管理モードに似ています。コアメンバーの意識強度は基本的に9以上です。
T組はこの委員会に対してあまり管理を行わず、主にプロジェクトマネージャーを派遣してプロジェクトの割り当てを行います。
T組のマネージャーとリーダーが共同でプロジェクトを指導し、残りの8人のメンバーは自由かつ独立して研究を行い、他の組織でサポートすることもあります。
T組が催眠惑星における意識強度への干渉戦略を立てる際には、この委員会が提供する技術が基盤として用いられます。
---
*注1:本文内の検出データはすべて2019年のデータです。
*注2:一部の被験者の当年の意識強度測定値は、元吾氏の記事「意識強度測定点:抽出検査データサンプル20190317」と照合して参照できます。
----
YWS
© 2019 All rights reserved.
Disclaimer: The content is intended solely for sharing experiences and providing reference without guarantees. Redistribution is allowed as long as it remains unchanged.



